
Considered by many to be the leading experts in RF over Fiber technologies, applications and solutions, Optical Zonu was asked to prepare an article for the Everything RF website. The topic is GNSS Timing for RFoF applications. You can visit the article on line here https://www.everythingrf.com/community/exploring-gnss-timing-applications-using-rf-over-fiber
 Exploring GNSS Timing Applications Using RF-over-Fiber
Exploring GNSS Timing Applications Using RF-over-Fiber
Oftentimes people confuse truly remarkable technologies with the mundane simply because “it just works.” There is no evidence of this quite like with wireless communication. There are countless mission-critical data transactions happening every moment across industries including telecommunications, finance, power & utilities, navigation and military & defense. The accuracy and stability of those transactions rely on the perfect synchronization of internal clocks that are constantly drifting ever-so-slightly from one another. If there aren’t mechanisms put in place to keep these clocks synchronized, there can be significant data corruption at best or even a failure to communicate.
This is becoming especially challenging now that communication is more advanced and complex with each passing day. The growth of the Internet of Things (IoT) introduces new connections requiring synchronization, endpoints are more geographically dispersed, and many industries are taking advantage of higher radio frequencies (RF) for low latency and higher throughput at the expense of resiliency. It is important to understand the role of timing across different applications in relation to these changes and why fiber is playing a crucial role in ensuring communication can still happen as efficiently and effectively as before.
How Does Precision Timing Work?
There are several different approaches to synchronizing computer internal clocks with our universal timing coordinated (UTC) global timing standard. The most common network-based standards are Network Time Protocol (NTP) and Precision Time Protocol (PTP). NTP is often better for a broader range of applications where a lower level of precision is acceptable. Conversely, PTP is ideal for high-precision timing because it can achieve sub-microsecond or nanosecond levels of accuracy due to hardware stamping (as opposed to software stamping).
However, both timing standards depend on packet-based Internet connections to communicate with the time server and are susceptible to network jitter that is common with Ethernet transport. Additionally, both NTP and PTP are not ideal when a network operator requires microseconds of accuracy across large distances or in dynamic environments.
This is where the Global Navigation Satellite System (GNSS) provides a suitable alternative or supplement to precision timing. GNSS is a constellation of space-based satellites that each simultaneously transmit timing data from highly precise atomic clocks to terrestrial receivers. Global Positioning Systems (GPS), which generally everyone is aware of, is an example of GNSS. Since GNSS requires only a clear view of the sky to work, and not an Internet connection, it is ideal for geographically dispersed use cases.
Why is Fiber Crucial to GNSS timing?
The global accessibility of GNSS makes it the most cost-effective and popular option for precise timing but it isn’t without challenges. Having a clear view of the sky is easier said than done, especially when considering that military and data center use cases are often in less-than-ideal environments for over-the-air communication. Terrain can be rough, often in remote locations, and facilities are composed of heavy metal and concrete that make for a difficult RF environment.
GNSS communicates through RF between 1.1 and 1.6 GHz and often uses coaxial cables to transmit data from the antenna to the servers. However, if the antenna is more than 50 meters away from the receiver, the attenuation will become too great and disrupt the signal. This is why RF over fiber (RFoF) is used to significantly extend the range; it attenuates several orders of magnitude less than coaxial cable. Not only is the performance better with fiber, but its non-metallic nature means it is immune to electromagnetic interference.
GNSS Signal Requirements
Equipment that relies on GNSS signals typically supplies the power required to operate the low noise amplifier (LNA) that resides within the antenna. The DC power is supplied to the LNA via Bias-T to the antenna. Typically, the “client” equipment monitors the power consumed by the LNA and is protected from shorts, lightning, and other potential issues by some electronic and spark arrestors. Essentially, this monitoring is used to test that a proper antenna load (e.g. power consumed by the antenna) exists if the antenna and its LNA are working properly. When the antenna is disconnected, blown, shorted or disrupted in any way, the client equipment detects it and provides a system alert that can be monitored remotely. This is true for wireless base stations and data center use cases. In other words, the equipment receives an RF signal for GNSS and also a signal to monitor the antenna load.
How to Build a GNSS over Fiber Architecture?
RFoF technology converts RF into optical signals and transports them over optical fiber cables. Once it reaches its destination, it reconverts the optical signal back into RF. These systems typically consist of a transmitter, optical fiber link, and receiver. Using RFoF for GNSS can be broken down into three segments: antenna signal propagation, redundancy requirements, and remote monitoring.
Antenna Signal Propagation
RF signal propagation is conducted in a classical RFoF modality: Antenna – coax – LNA – laser diode driver – laser diode – fiber – photodetector – post amplifier. But when distributing GNSS signal via fiber, the antenna load mentioned earlier must also be propagated and thus requires a special two signal transport encompassing the antenna load and RF. It is important that network operators understand the difference between equipment that shows antenna load status only at the output of the optical receiver instead of the proper way where that antenna load status is propagated in parallel to the RF signal. The former example will not properly display the antenna condition so the operator can identify the type of problem immediately.
Redundancy requirements
The required reliability for delivery of GNSS signal is very high due to the dependence of critical equipment operation on the timing source. A resilient system must withstand a single point of failure and still provide the full signal. That translates to a need for multiple antennas (preferably located away from each other), dual electronics, multiple fibers (routed differently so a cut fiber will not stop operation), and dual receivers with automatic switching. Industrial-grade equipment provides all such features with great flexibility to meet the market demands that may be different for different critical infrastructure elements.
Remote Monitoring
All infrastructure network elements must be monitored 24/7 to address any real or potential failure. At a minimum, monitoring and alarm/warning generation should include a report on the status/availability of an antenna, the integrity of the fiber signal and the quality of the GNSS. It is possible to monitor all visible satellites and the signal strength – but this is rarely required. Using existing SNMP (Simple Network Monitoring Protocol) enables the connectivity of industrial-grade GNSS distribution to an NMS (Network Monitoring System) that manages all alarms and can distribute instantaneous messaging to command centers or support personnel. For systems that are designed with redundancy, such alarms and warnings enable preventive maintenance while the system or timing distribution stays fully functional.
Other considerations
Costs, ease of installation and operation are always important considerations when deploying a GNSS-over-fiber system. The ergonomic design that enables an intuitive understanding of the functional LED is one example of this. Auto-termination is another useful feature that makes the installation and operation of GNSS over fiber more cost-effective. In the RF splitter that distributes the signal to multiple points, unused ports must be terminated with a 50-ohm load to avoid signal degradations due to the reflectivity of an open connector at the GHz range. Some equipment providers offer auto-termination, which saves the need to connect to an external load for an installation easier and to avoid future performance issues.
Examples of GNSS over fiber architecture
Dual Antenna Co-located (Figure 1)
Two antennas connect to a two-channel fiber transport transmitter that combines the channels into a single fiber, which can be passively split to connect with a transport receiver or base unit. Depending on the needs, a typical GNSS over fiber network will split between 8 to 32 ways to 32 receivers with up to 16 RF outputs each for point-to-multipoint connections. Special circumstances sometimes require up to 16 splitters depending on network size and the number of endpoints requiring timing synchronization. In this case, the fiber is not redundant since both channels are routed together.
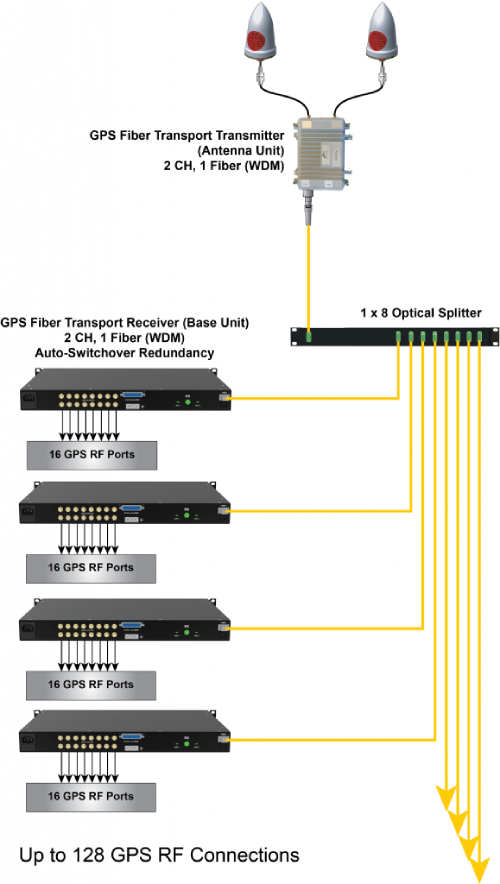 Figure 1: GPS over fiber network – single fiber 8 splits ->128 endpoints redundant Antenna/Transmitter/Receiver.
Figure 1: GPS over fiber network – single fiber 8 splits ->128 endpoints redundant Antenna/Transmitter/Receiver.
Dual Antenna Not Co-located (Figure 2)
Up to 516 endpoints are served by two independent antennas located far apart from one another (e.g., different buildings on a campus). Each antenna’s optical signal is split and a signal from each antenna is delivered to a receiver with 16 RF outputs. The full redundancy goes from the antenna into the dual receiver, but the delivery into the equipment is still a single point of failure since there are 2 1×8 splitters for which one can fail. However, equipment with dual GNSS timing inputs can be connected to two independent outputs each from a different splitter to ensure protection from a single point of failure.
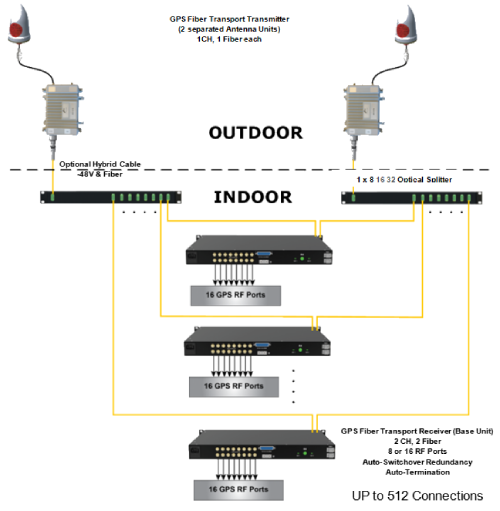 Figure 2: GPS over fiber network – 2 antennas ->512 endpoints redundant Antenna/Transmitter/Receiver. 16 TF outputs from each Receiver (auto terminated). Can be used with dual-entry equipment.
Figure 2: GPS over fiber network – 2 antennas ->512 endpoints redundant Antenna/Transmitter/Receiver. 16 TF outputs from each Receiver (auto terminated). Can be used with dual-entry equipment.
4 Antenna Not Co-located (Figure 3)
Up to 516 service points are served by 4 independent antennas located far apart from one another on different structures. In this architecture, the antenna pairings have completely independent circuitry and transmit at a different wavelength. Each antenna’s pair optical signal is split, combined with a signal from the other location and a signal from each location is delivered to a receiver with 16 RF outputs. The full redundancy goes from the antenna to the two receivers, each completely independent from its pair. Equipment with dual GNSS timing inputs can be connected to two independent outputs for full redundancy so any element of the network can be replaced without interruption.
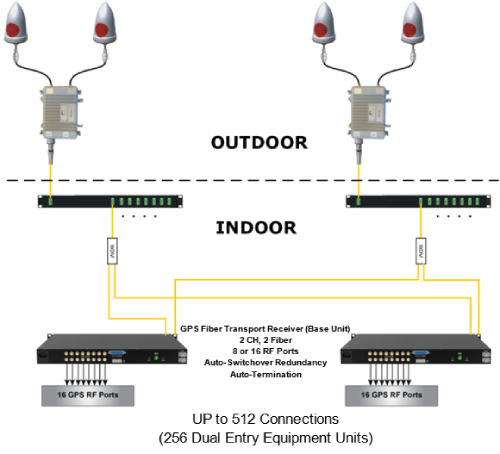 Figure 3: GPS over fiber network – 4 antennas 2 locations ->512 endpoints redundant Antenna/Transmitter/Receiver. 16 TF outputs from each Receiver (auto terminated). Can be used with dual entry equipment – 256 such dual entry servers are served.
Figure 3: GPS over fiber network – 4 antennas 2 locations ->512 endpoints redundant Antenna/Transmitter/Receiver. 16 TF outputs from each Receiver (auto terminated). Can be used with dual entry equipment – 256 such dual entry servers are served.
Given the increasing importance of GNSS timing, particularly for data centers, it is more likely to see a double redundancy setup where a backup optical receiver can pick up the signal should a failure occur for the primary option. Data networks are becoming increasingly complex and mission-critical, where downtime for even a moment could compromise valuable information. The goal for any RFoF architecture for GNSS timing is to create a highly efficient network that delivers GNSS timing to as many endpoints with few antenna sites. In nearly all cases, RFoF should be able to provide timing data to over 500 endpoints from a single antenna.
What are the most common GNSS timing use cases?
Telecommunications: Telecommunications networks including cellular networks, satellite communication systems, and internet services require precise timing to ensure accurate data transmission and reception, optimizing network efficiency and reliability.
Financial Transactions: GNSS is often used for timestamping transactions in stock exchanges, banking systems, and high-frequency trading platforms. Accurate timing is crucial for maintaining transaction integrity and ensuring fairness in financial markets.
Power Grid: The generation and distribution of power in electrical grids is often synchronized through GNSS. Precise timing ensures efficient coordination among different components of the grid, including power plants, substations, and smart grid devices, helping to maintain grid stability and reliability.
Transportation: GNSS timing is fundamental for aviation, maritime, and automotive navigation systems. Accurate timing enables precise positioning and navigation, enhancing safety and efficiency in transportation networks.
Military and Defense: GNSS timing plays a vital role in military and defense applications, including command and control systems, missile guidance, and reconnaissance operations. Precise timing is essential for coordinating military activities and ensuring the effectiveness of defense capabilities. For safety reasons, the antenna that receives the GNSS signal is far from the server and therefore requires a fiber connection to ensure a resilient signal over long distances.
Scientific Research: Scientific research fields such as geodesy, seismology, and climatology use precision timing to help scientists monitor and analyze Earth’s movements, study environmental changes, and conduct experiments requiring precise temporal synchronization.
Conclusion
Synchronized timing through GNSS is an often understated and critical component of modern-day communication. It grows more challenging because of the sheer number of new data points, the use of higher frequency communication, and the building of important data centers in highly remote areas. RFoF is helping to bridge the gap caused by a growing distance between antenna and receivers that coaxial cable is simply unable to support.
About the author:
Meir Bartur, Ph.D., is the President & CEO of the Optical Zonu Corporation. Dr. Bartur has over 30 years of experience in leadership, product development, and technology innovation. As a Senior Member of the IEEE and recognized leader in the development of low-cost fiber optic solutions for FTTx, he contributed to the IEEE ITU PON standards. Before founding Optical Zonu, he directed Advanced Product Development and Strategic Technology for access transceivers at MRV Communications’ (MRVC), as well as business relations with its major clients. Prior to that, he held posts as VP of Engineering & Technology at SSDI (Solid State Devices Inc), VP of Engineering at MEC (Molecular Electronics Corp), and systems engineering Captain in the Israeli Air Force.